Assumption. We assume that blocks of fixed size within the true image exhibit mutual correlation.
-
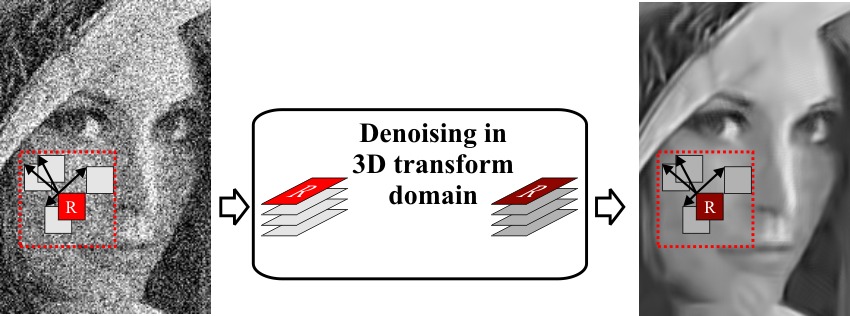
Application. We use block-matching to find blocks from the noisy image, which exhibit similarity to the currently-processed one. The matched blocks are stacked to form a 3D array.
-
Benefit. Due to similarity between matched blocks, there is correlation along the dimension of the array in which the blocks are stacked. A 3D decorelating unitary transform represents sparsely the true signal, thus the noise can be effectively attenuated by shrinkage of the 3D transform coefficients.
|