Optimal inversion of the Anscombe and Generalized Anscombe variance-stabilizing transformations
Efficient Denoising and Deblurring of Low-Count Poisson Images Using Off-the-Shelf Gaussian Filters
Abstract The removal of Poisson or Poisson-Gaussian noise is often performed through the following three-step procedure. First, the noise variance is stabilized by applying either the Anscombe or the Generalized Anscombe root transformation (also called Anscombe transform) to the data, producing a signal in which the noise can be treated as additive Gaussian noise with unitary variance. Second, the noise is removed using a conventional denoising algorithm for additive white Gaussian noise. Third, an inverse transformation is applied to the denoised signal, obtaining the estimate of the signal of interest.
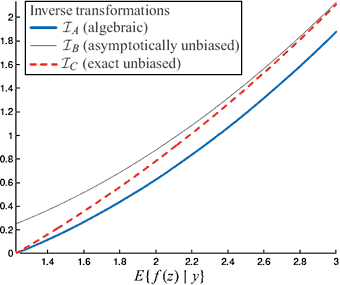
The choice of the proper inverse transformation is crucial in order to minimize the bias error which arises when the nonlinear forward transformation is applied.
We introduce the exact unbiased inverses of the Anscombe and Generalized Anscombe transformations and show that they play an integral
part in ensuring accurate denoising results, particularly at the low-count regime, leading to state-of-the-art photon-limited imaging without any notable increase in the computational complexity compared to
the other inverses.
We also show that these inverses are optimal in the sense that they can be interpreted as maximum-likelihood inverses.
Moreover, we thoroughly analyze the behaviour of the proposed inverses, which enables us to derive their closed-form approximations.
Our recent work on iterative filtering of combinations of the noisy image with a progressively refined estimate leads to very efficient denoising and deblurring of even extremely low-count images (less than one count per pixel) using off-the-shelf Gaussian filters.
Any unauthorized use of the provided software and files for industrial or profit-oriented activities is expressively prohibited. By downloading any of the files contained in this site, you implicitly agree to all the terms of the TUT limited license. Please read the TUT limited license before you proceed with downloading any of the files.



 and denoised (right) Galaxy")
 and denoised (right) Cells")
 and deblurred (right) Cells")

 http://doi.org/10.1109/LSP.2016.2580600
http://doi.org/10.1109/LSP.2016.2580600