TAMPERE UNIVERSITY OF TECHNOLOGY
-
Department of Signal Processing
TAMPERE UNIVERSITY OF TECHNOLOGY
-
Department of Signal Processing
Introduction |
Book |
Software |
Related work & |
People |
Publications |
BookThe concepts, theory, and methodology of the modern spatially adaptive (nonparametric regression based) signal and image processing are presented in the new book: Local Approximation Techniques in Signal and Image Processing by V. Katkovnik, K. Egiazarian, and J. Astola, SPIE Press, Monograph Vol. PM157, September 2006. Hardcover, 576 pages, ISBN 0-8194-6092-3 Table of contents and preface Sample Pages (PDF, 209 KB) |
 |
|
|
The LASIP routines for anisotropic image restoration are used to drive powerful transform-based algorithms for Shape-Adaptive DCT image filtering. These newly developed image denoising and deblurring methods achieve superior restoration performance. | ||
|
|
|
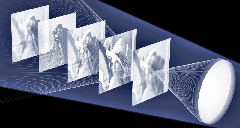
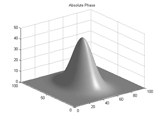
The LASIP routines for Multiframe Blind Deconvolution are used for restoration of an image from its multiple blurred and noisy observations. |
|
|
This section provides LASIP routines for the Fitted Local Likelihood (FLL) technique. The FLL is a novel statistical multiple hypothesis testing rule based on the local maximum likelihood estimation. This proposed statistics provides better performance for both Gaussian and non-Gaussian imaging (Gaussian, Poisson, Bernoulli models). | 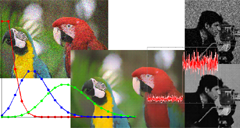 |
|
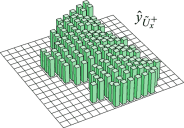
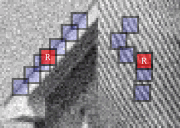
| We propose a novel image denoising strategy based on an enhanced sparse representation in transform-domain. The enhancement of the sparsity is achieved by grouping similar 2D image fragments (e.g. blocks) into 3D data arrays which we call "groups". Collaborative filtering is a special procedure developed to deal with these 3D groups. We realize it using the three successive steps: 3D transformation of 3D group, shrinkage of transform spectrum, and inverse 3D transformation. The result is a 3D estimate that consists of the jointly filtered grouped image blocks. By attenuating the noise, the collaborative filtering reveals even the finest details shared by grouped blocks and at the same time it preserves the essential unique features of each individual block. The filtered blocks are then returned to their original positions. | |||
|
|
|
|
|
|
|
|
|